The terms accuracy, repeatability, and resolution can be found on the spec sheets of many engineered products. They are often misunderstood, used interchangeably, or just plain confused. This can cause products to be incorrectly specified and, in many cases, over-designed for an application. Let’s take a few minutes to talk about these specifications and how they apply in the field of automation and motion control.
First, let’s talk about measurement. Measurements can be done on anything, like mass, distance, or even more complicated things like flow rate or humidity. The point is that everything can be measured. The next thing to keep in mind is that nothing is perfect. So, a question that comes up when specifying a product or solution is, “How imperfect will my results be?” Fear not, there’s a measurement for that. Accuracy, repeatability, and resolution are all used to describe the “correctness” of your results.
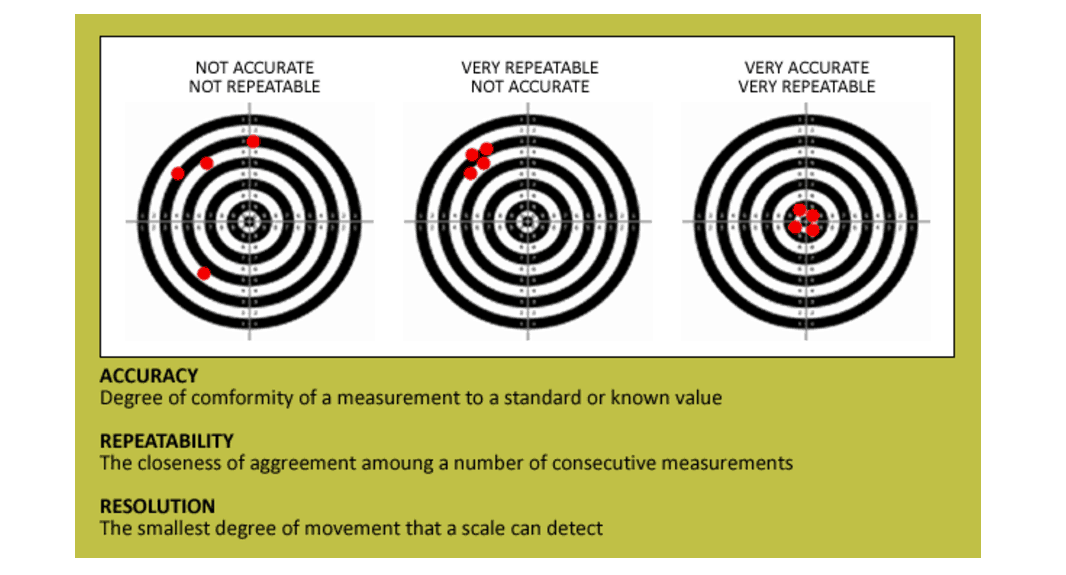
Here are some very simple definitions for each term:
- Accuracy: How close a measurement is to the actual value.
- Repeatability: How close a group of measurements are to each other.
- Resolution: The smallest difference that can be measured.
As a quick example, let’s measure the weight of a diamond. That’s a pretty important measurement to get right. The actual weight of the diamond is 1.50 karats. The diamond is weighed 3 times and the readings are 1.46, 1.45 and 1.47 karats. The readings were off from the actual weight by as much as 0.05 karats. That is essentially the worst-case accuracy. But the readings were all within 0.02 karats of each other, that is the repeatability. The smallest difference that the scale can measure is 0.01 karats, that is the resolution.
For a more in-depth article on the subject, check out J.A. King’s website. They’re one of the groups of Cross Company and precision measurement experts. And if you want to get really deep into the metrology weeds, here’s their article on uncertainties and why they matter.
Accuracy, Repeatability, and Resolution In Action
Now, let’s get into a real-world automation example. Bert’s Electric Supply has an application that requires a wire to be cut to a certain length; 900mm to be exact. The wire has to be cut within 0.1mm of 900mm. To pull the wire to length, we will use a ball screw actuator driven by a servo motor. The ball screw has a 10mm/rev lead and the servo motor has a 2000 count/rev encoder. This system has a resolution of 0.005mm (10mm/2000). The catalog for the ball screw states the repeatability is +/- 0.02mm. So far, so good. We program the servo motor to make a move where it rotates 90 times, which should equate to a distance of exactly 900mm.

After running the machine for a while it is discovered that the parts are too long. Three parts were measured and the values were 900.305mm, 900.295mm, and 900.300mm. The measurements were all very close, within 0.01mm of each other, so the repeatability is very good and within catalog specification. But it seems like all the measurements are off by about +0.3mm. How could this happen?
Repeatability was mistaken for accuracy, that’s how. This is a very common problem, and these are real world numbers. Even though the system has a resolution of 0.005mm and a repeatability of 0.02mm, the actuator was still off by 0.3mm after traveling 900mm. The reason? Nothing is perfect, not even a precision ground ball screw. Positional accuracy is dependent on the stroke length and as the actuator travels 900mm, it is not uncommon for it to be off a few tenths of a millimeter.
So, what do we do now? Do we trash this system and start from scratch? Not so fast. What if we calibrate the system? The +0.3mm error can be accounted for by reprogramming the move. Maybe if we shoot for 899.7mm, we will actually hit 900mm. So instead of 90 turns of the screw, we will program the motor to rotate 89.97 times.
The solution worked! It turns out that even though the application called for positional accuracy, it could be accomplished with repeatability and a little calibration. This saved Bert a lot of money because a system that has an accuracy of 0.1mm at 900mm would be much more expensive. Bert was very happy. So happy in fact that now he wants to use this system to cut all of his wire. He wants to be able to enter any length in millimeters on an HMI screen and have the system cut that length. Now we are in trouble…
We could map the positional error throughout the entire travel range and make a calibration table, but that would be time-consuming and there is a lot of opportunity for mistakes. At this point, it may be better to add another measuring device, like a linear encoder, that has a guaranteed accuracy.
Hopefully, this example helped to show how accuracy and repeatability are commonly confused in motion control applications. We should stress the point that nothing is perfect. As engineers, we have to determine if the level of imperfection will be acceptable for the application.
Still not sure how accuracy, repeatability and resolution apply to your application? Contact an expert at Cross today!