Robots have many ways to help improve production processes. In most cases, end users usually focus on ways to tend machines, package products, unload conveyors or any other wide range of pick and place applications. One method that can have a significant impact but sometimes gets overshadowed is robotic inspection.
Quality concerns can mean huge profit losses for manufacturers. This is particularly true for manufacturing companies that supply components for other companies. In those situations, even one product making it to the end user can mean costly repercussions for the supplier. Often the whole run of parts has to be brought back in house for inspection, rework, or in some cases even to be scrapped out. Not only is this labor intensive, but also requires a new run to meet the original requirement.
One way to help reduce the chance of this happening is by incorporating robotic inspection in the process. With collaborative robots, this can often be done in line (right next to operators) without impacting the final throughput.
There are many great inspection cameras on the market, each with their own benefits and advantages. So for this article, I want to focus on the robot side of the equation and show you what it would take to program a simple inspection from the UR side.
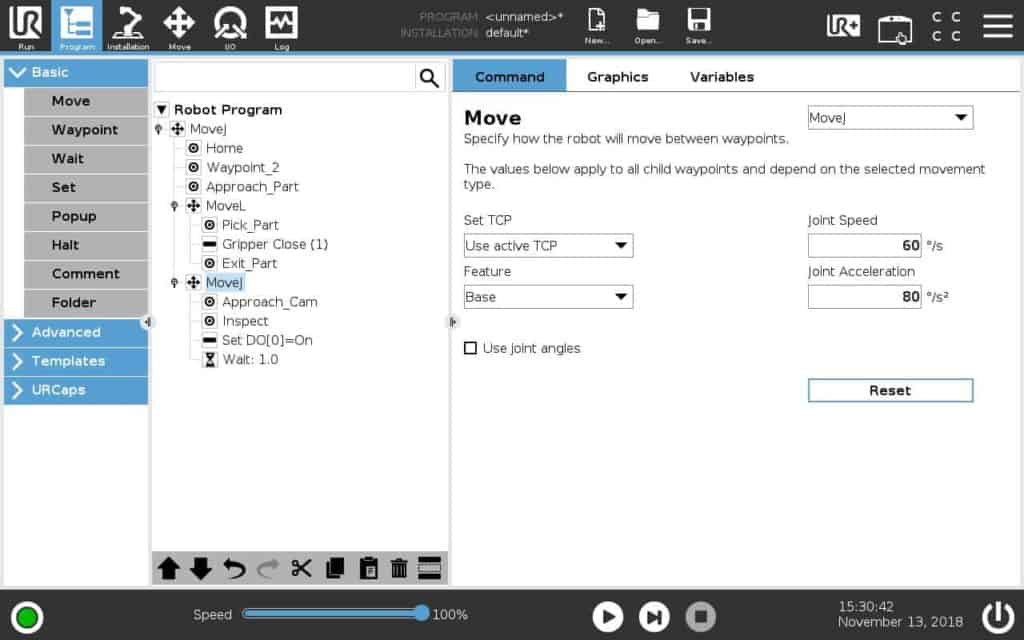
In the image below, we’ve created a basic robot program that will pick up a part and transport it to the location where the inspection will occur. In this scenario, there is a fixed mounted camera and the robot will simply position the part under the camera for inspection, without releasing it’s grip. At this point, the camera will take over and perform the inspection. Digital Output [0] would be wired into a Digital Input of the camera to trigger the inspection.
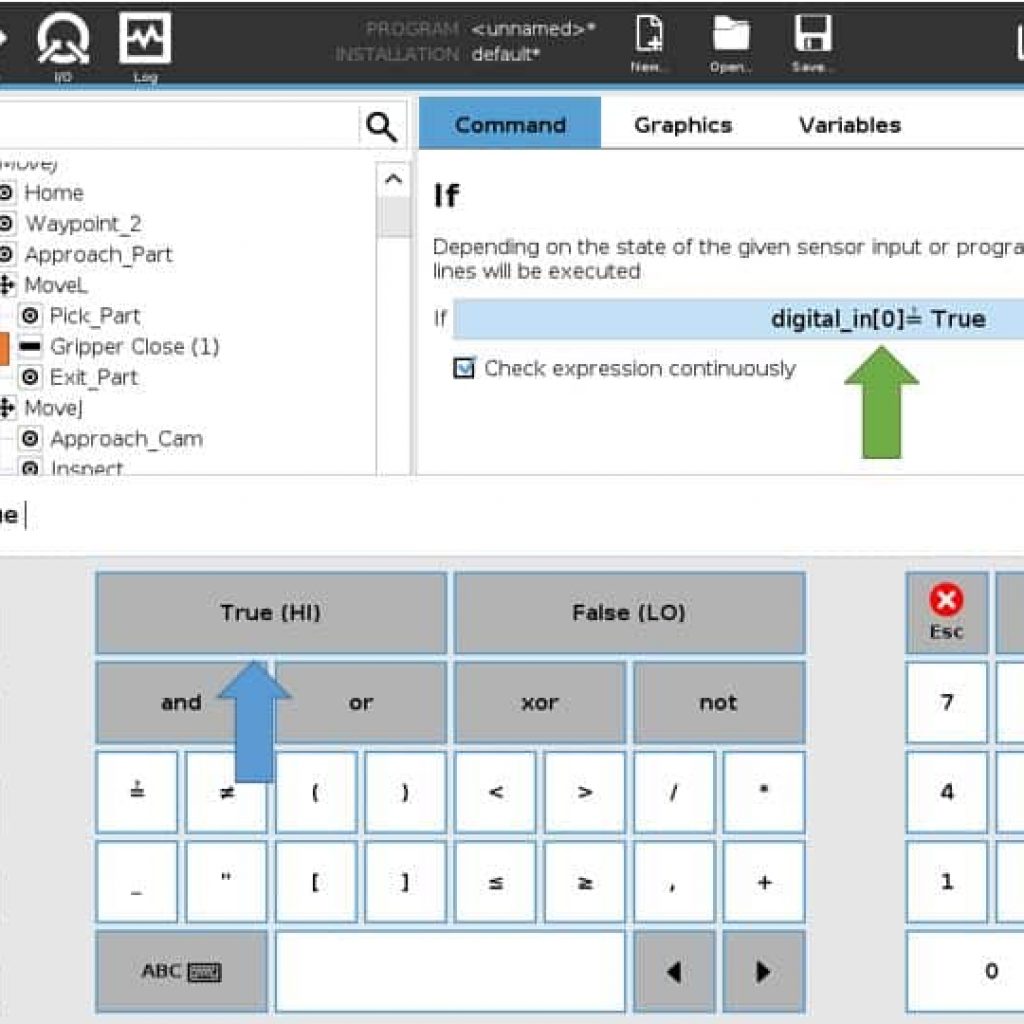
The image below shows how we can utilize an “If Statement” within our program. To insert the “IF” node, select where the orange arrow indicates. By incorporating this node we can now look for other information to dictate what happens within our robot program. Clicking the character box (indicated by the green arrow) you will have access to create a condition for which the robot will look. From here, we simply tell the robot to look for Digital Input [0] to equal “True (Hi)”.
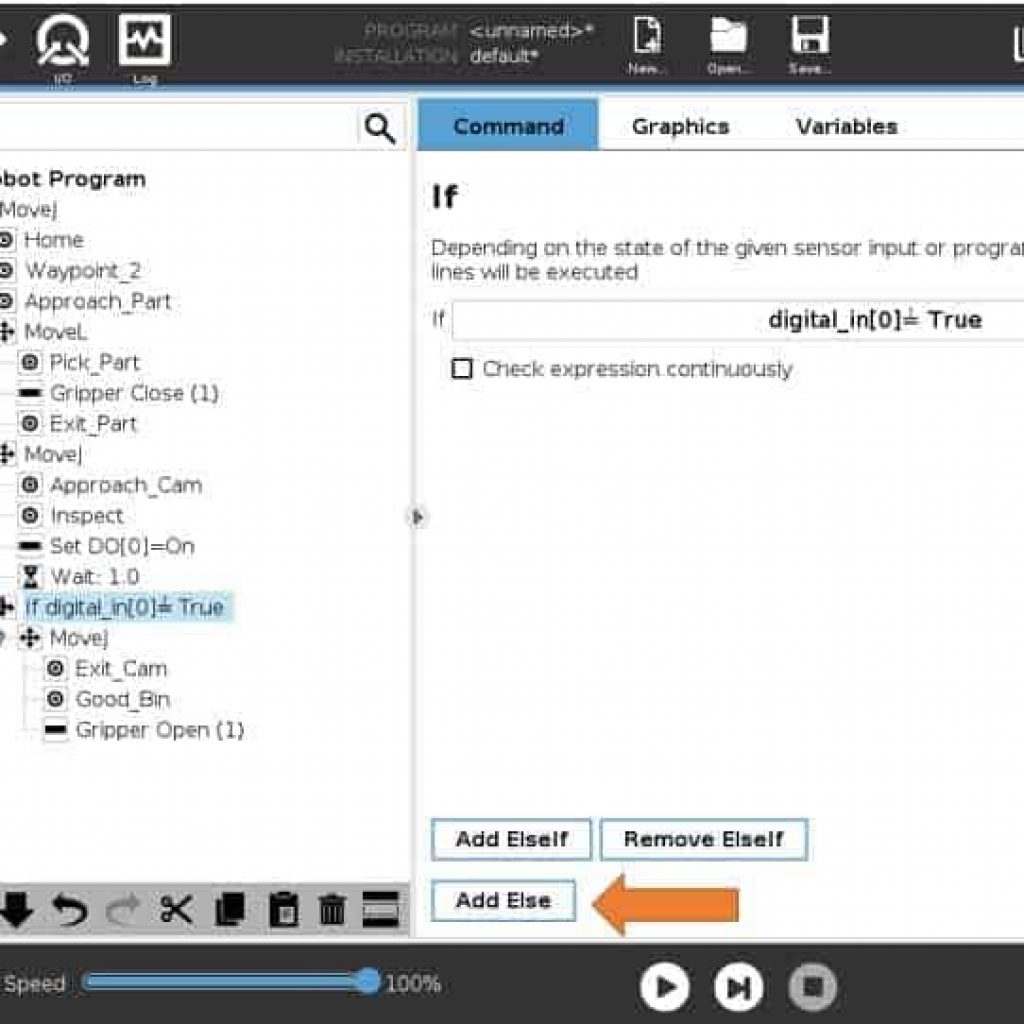
Once our condition is in place, we can create the portion of our program that we would like the robot to follow given that condition. In this case, the inspection camera would send an output to Digital Input [0] for a good part. So when our program receives the input for a good part, it will move the part to the “Good Bin” and place it in the bin. However, the part may not always pass the inspection. In which case we would receive “no” input from the camera. To account for this scenario, we would add the “Else” node into our program (indicated by the orange arrow).
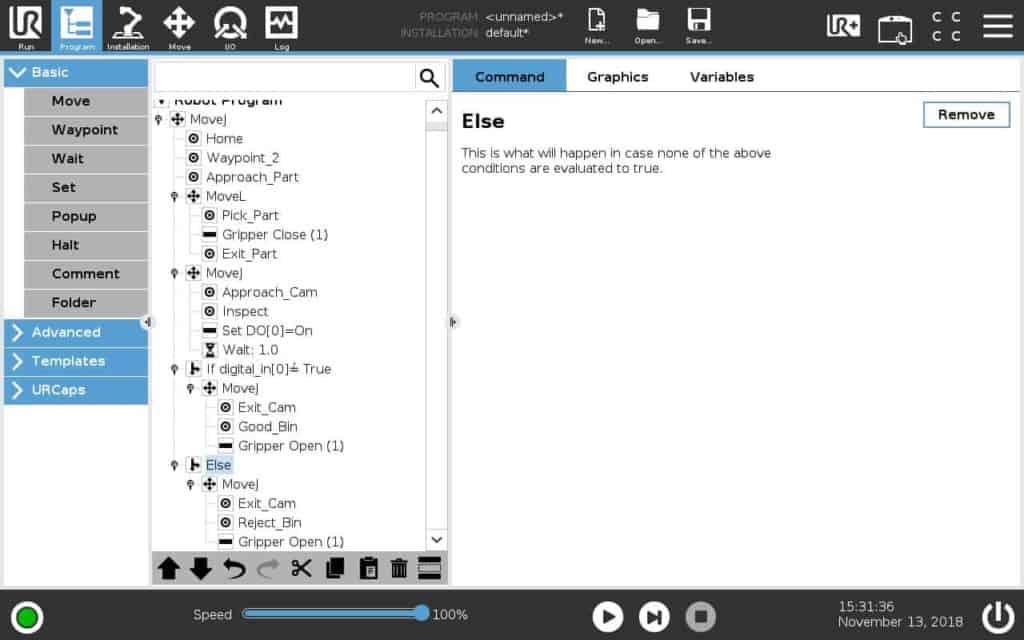
Without receiving an input telling us that the part passed inspection, we know that it was a defective/suspect part and should be placed into the reject bin. Under the “Else” node, simply create a couple of waypoints and gripper command to place the part into the reject bin.
The beautiful part about If Statements is that they are extremely flexible. They can be used not only for inspection, but any condition that you would want to impact your robot program.
As always, if you have any questions or would like further elaboration Cross Robotics is here to help. We look forward to working with you soon!