Force Limited Collaborative Robots offer many different ways to help foster a safe working environment. Some of the methods that get commonly discussed are ways to prevent impacts from happening in the first place. Using things like area scanners, light curtains, or safety mats are all great options when your risk assessment determines there may be things like pinch points or an unsafe tool on the end of the robot. But what makes the force limited cobots special, is they have the ability to register that they bumped into something and stop their motion even if a collision does happen. Your risk assessment will determine what level of impact would be considered safe, as there is a difference between a collision occurring with someone’s arm and an upward sweeping motion that could potentially collide with someone’s head or neck.
If you have determined that extra safety measures aren’t required for your application but you still want to limit force, a Universal Robot makes changing the default force setting simple. The default setting is 150 Newtons at the tool, but that can be adjusted down to 100 Newtons if you would like. To make changes, follow the steps below:
To start, click the “Installation” tab indicated by the orange arrow in the image below. Then select “Safety” indicated by the green arrow.
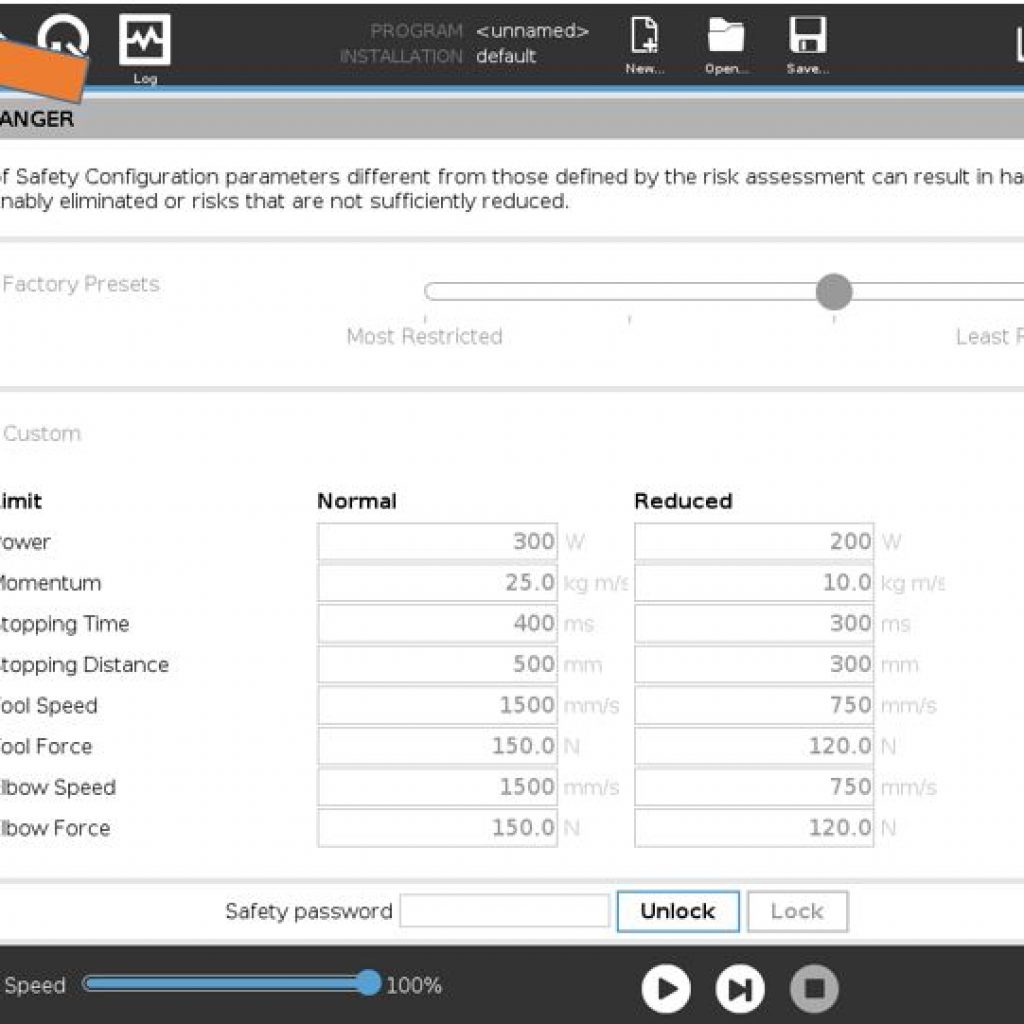
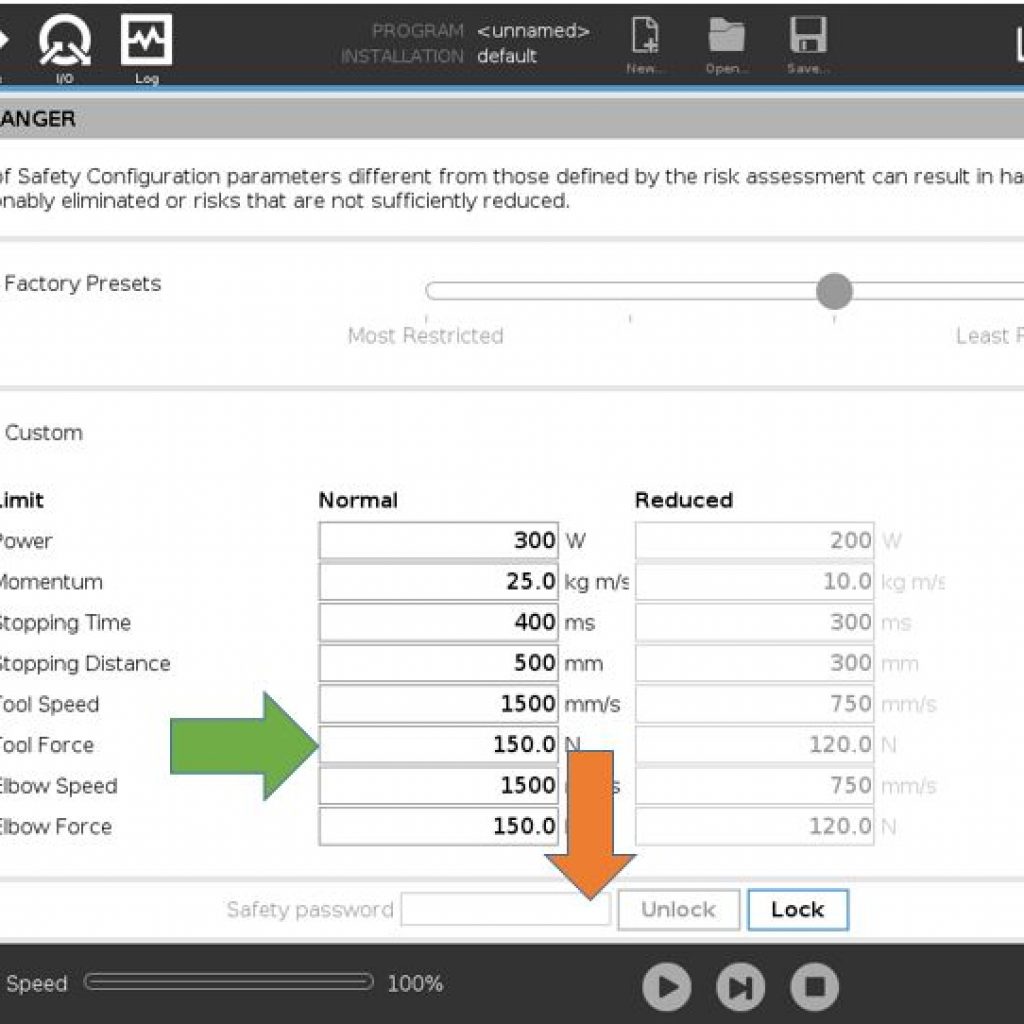
Next, you will need to input your safety password in the field indicated by the orange arrow (shown below). For robots received from Cross Robotics, the default safety password will be “ursafe”. Once unlocked, you can make the change to the tool force by clicking the field indicated by the green arrow and selecting the value that you desire.
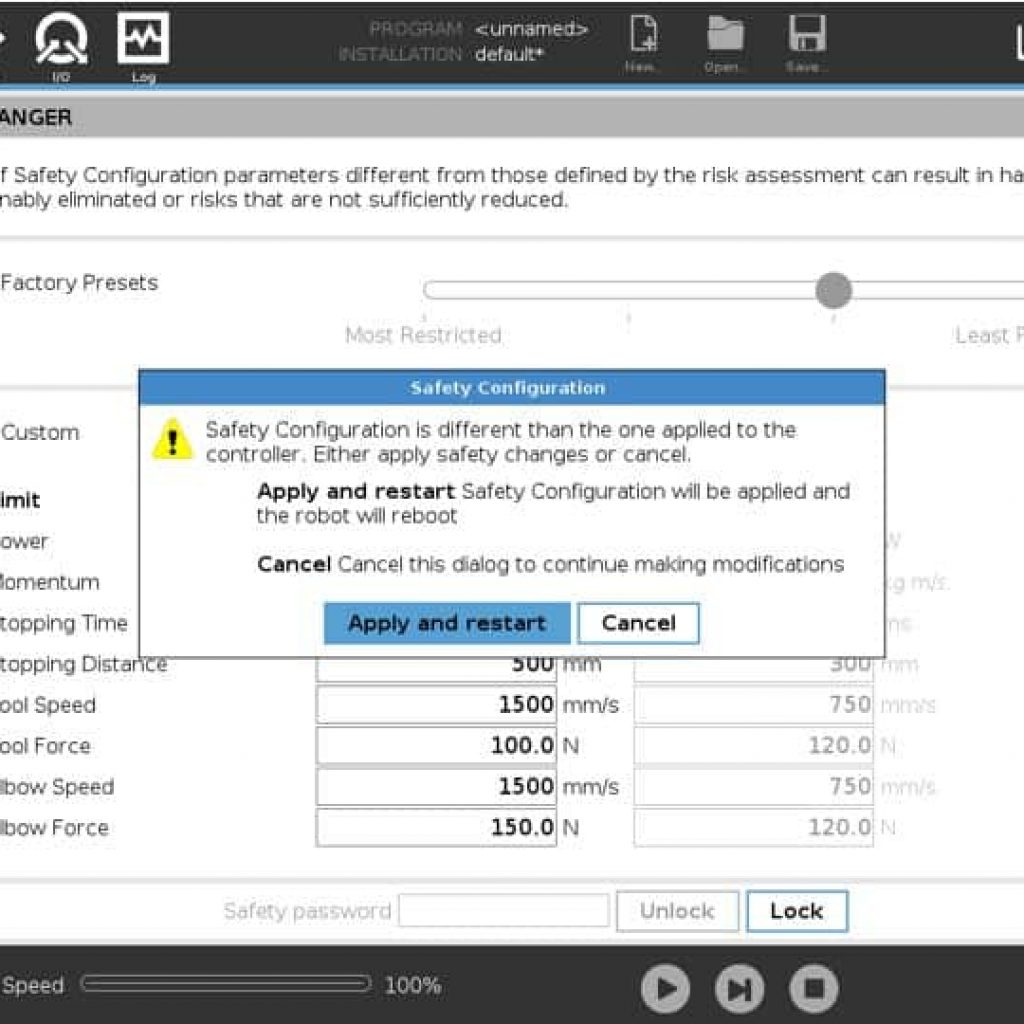
Once you hit “Apply”, a pop up box will open up. Press “Apply and Restart”.
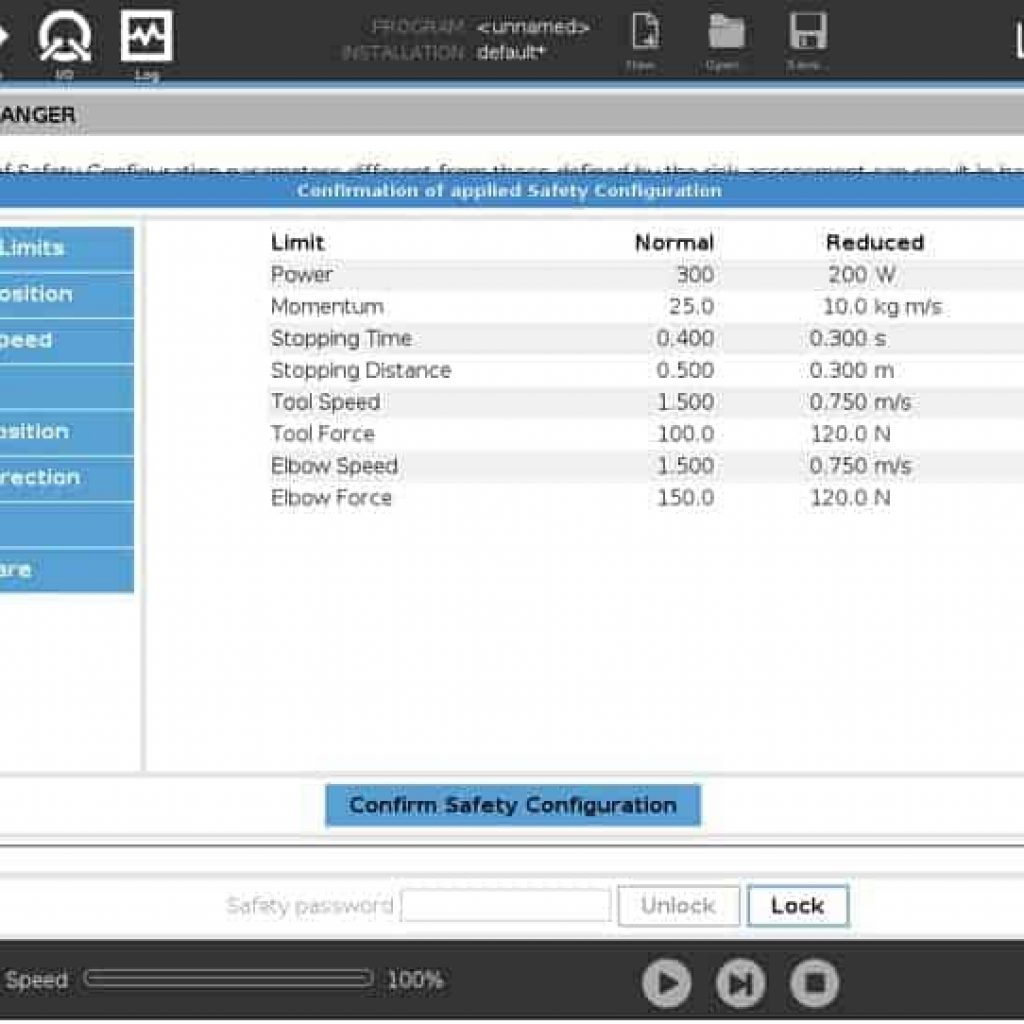
From there, you just need to “Confirm Safety Configuration” and reinitialize the robot.
This can be a great method for helping create a safer working environment without needing to incorporate additional safety equipment. As always, a safety risk assessment is required for all robotic applications, but this can be another tool to be used to help keep those working around the robot safe. For any questions or if you want to discuss your specific application, Cross Robotics will be happy to help in any way we can. Fill out our contact form and we’ll had an expert get in touch as soon as we can!