




100% Employee Owned, Founded 1954
With robotic applications expanding beyond the typical high-speed pick and place, many collaborative robot applications call for the ability to pick delicate objects that could be damaged by a pneumatic gripper or those whose shapes are not conducive to be picked by a vacuum gripper. In these situations, the electromechanical gripper can often be the solution.
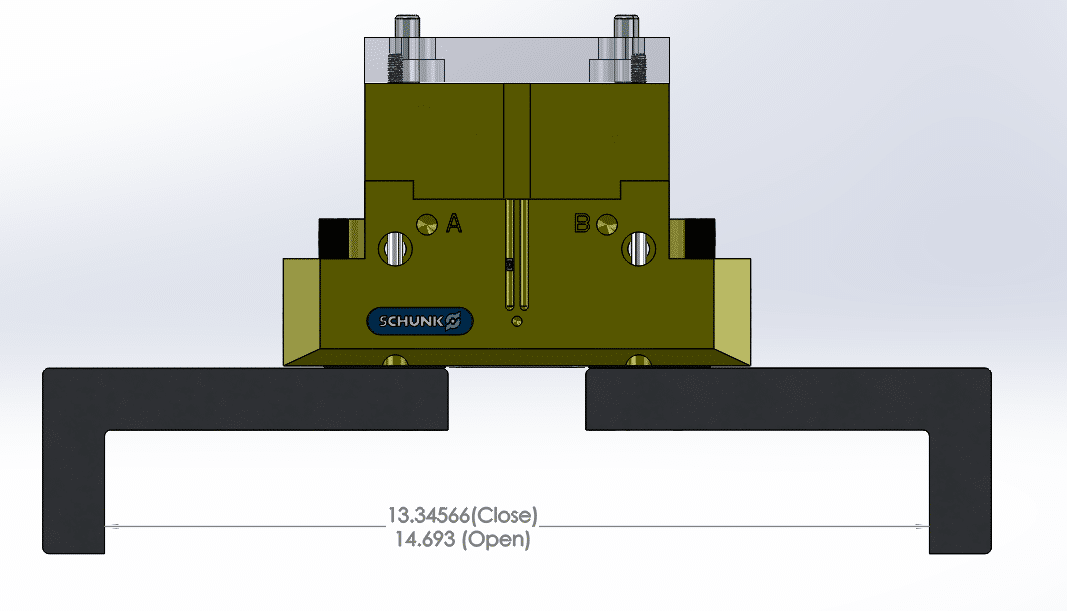
Take a look at some of our featured electromechanical grippers and contact a Cross team member to see the full lineup of electromechanical end effectors we offer.
Electromechanical end effectors are made up of a gripper, an actuator, and a control system. The gripper is the part that grips objects or products. The actuator moves the gripper. And the control system regulates the movement of the actuator itself, allowing operator control of the grip.
Knowing the components that make up an electrical end effector help you to ensure that you’re getting the best product for your application. In addition to the right components, the use-case of the end of arm tooling must also be taken into account. Some potential considerations include the weight of the objects being gripped, the size of the parts being gripped, the object’s surface texture, and the production environment itself (ie, is it suitable for electromechanical equipment in general).
Taking these factors into consideration allows us to work with you to make the best possible decisions for your industrial automation systems.
There are a number of benefits to utilizing electromechanical automation like EOAT, grippers, or end effectors in your manufacturing process. Some of these benefits include
Electromechanical end of arm tooling is able to grab and release objects quickly and efficiently. It also enables robots to work continuously, which can dramatically increase throughput
Electric EOAT components pick and place objects accurately every single time. That means every pallet will look the same and there will be increased production line consistency.
Electromechanical end effectors are reliable and durable. They’re typically capable of continuous movement and longer-term performance with a relatively low maintenance cost.
The right end effector is critical for an industrial or collaborative robot to function as intended. A few common applications for end effectors include
Choosing the right end effector is essential to ensuring proper robotic operation. Having the wrong end effector on a robotic arm can cause many problems, ranging from reduced efficiency to an inability to perform the desired task at all.
At Cross Automation, these are all factors that we consider when devising an electromechanical robotic end effector solution for our clients. That’s how we’re able to design custom solutions to fit the needs of our costumes every time. And one of the main reasons so many in the industrial world come back to Cross Company again and again.
As the manufacturing world becomes increasingly competitive, automation is no longer a luxury. It can even mean the difference between your operation and a close competitor’s. Robotics, pneumatic systems, and other automation equipment have become integral parts of many manufacturing processes. When integrated properly, industrial automation can increase throughput, productivity, and worker safety.
Whether you need to implement automation systems for the first time or you’re looking to upgrade an existing system, Cross can work with you to develop custom solutions. We have the industry partnerships, technical industrial expertise, and world-class customer service necessary to provide you with the pneumatic products and accessories your operation needs.
Contact a member of Cross Automation today to start the process and get the pneumatic products, components, or accessories you’re looking for. And see for yourself why so many operations choose Cross as their single-source solution for industrial automation and pneumatic accessories.
At Cross, we offer much more than just electromechanical end effectors. We can also provide the products our OEM and other manufacturing partners need to succeed. Check out our other end effector products and see for yourself.
Sign up for our newsletter to get industry trends, educational content, and product updates, the way you want to receive them.
© 2023 Cross Company. All rights reserved | Privacy Policy | Terms of Use | Terms of Sale
Design Collaboration and Hosting by Drum Creative
"*" indicates required fields
We’re looking through thousands of pages to find the most relevant information.
In the meantime, enjoy these fun facts…