The ideal motion control motion profile has a trapezoidal shape, the typical profile desired by most engineers when programming a move controlled by servo motor moving a linear actuator. Can a move such as this be obtained when using a pneumatic actuator?
What happens in a typical pneumatic actuator application?
A typical pneumatic actuator application has a directional control valve sending compressed air to make it move to another position. It will then get a different signal and return to its original position. The motion profile for this type of move is one of constant acceleration during its move from point A to point B, with speed also increasing until the air flow is constrained by the physical limits of the plumbing or a flow control.
The part of the motion profile that is not accounted for in a typical pneumatic actuator move is the negative acceleration – or deceleration – that is preferable at the end of the stroke. This deceleration allows you to reduce speed in a controlled manner, much like a driver slows his automobile and stops at a red light. Avoiding a sudden stop is better for the part that is being moved and also for the actuator.
What methods are available to provide motion control in a pneumatic actuator?
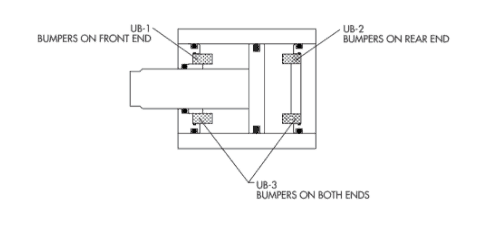
Bumpers – These are typically elastomeric pads that are installed inside the actuator to come between the piston and the actuator body at the end of stroke position in one or both directions. Bumpers are certainly useful in preventing the metallic “click” that can be heard when no bumpers are present and they do provide some minimal deceleration. However, higher loads and speeds can quickly overcome them and make them useless.
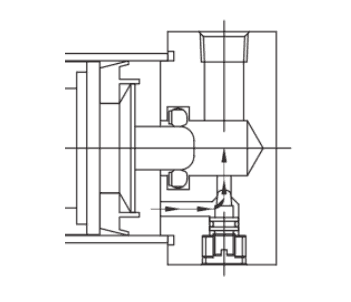
Cushions – These are an option available on many types of actuators. An internal spear on either side of the piston enters an internal hole on either the head or cap when the piston approaches the end of the stroke. A seal is engaged by this spear, blocking the normal path that exhausting air takes through the actuator port. This forces the remaining exhaust air to take another path that passes through a variable orifice. This allows the user to adjust the orifice to provide a “cushion” of air to provide deceleration over the last bit of stroke. Cushions do a fine job of providing deceleration but can also be overcome at higher loads and speeds. An inertia calculation can be performed to determine if the cushion option will work for a given application.
Shock absorbers – These are the next option available when standard air cushions cannot handle the load or speed. These are self-contained hydraulic units that are typically installed external of the pneumatic actuator and are engaged by the actuator or its load at the end of the stroke. They work by forcing oil to travel through internal orifices when the piston is moved. They are available with different motion profiles depending on load, speed, and the number of cycles required for a particular application.
Proportional control – This is the ultimate way to achieve true motion control with a pneumatic actuator. However, it is also the most expensive way. In order to work properly, the actuator must have some type of position transducer to provide feedback to the control device. The control device can be a proportional valve or two proportional regulators. Either system allows the user to set parameters to make the actuator move along a desired motion path and decelerate to a very accurate stopping point. Some initial work must be done to set the motion profile up properly, but once this is done these systems perform extremely well.

Which method should I select for my application?
If you are going to use a pneumatic actuator to move something on a machine, the entire motion profile should be considered. All too often an actuator is simply sized to move a load from point A to point B with little thought given to what the motion profile will look like. Simple inertia calculations will tell you which method to employ that will safely and reliably decelerate the movement of the actuator at the end of the stroke.
- Obviously, bumpers are the least costly option available. They are a fine choice for light loads and/or slow speeds and will also reduce noise. Additionally, they are completely internal to the actuator and therefore cannot be removed or adjusted.
- An option for cushions is available for most pneumatic actuators and should be used if bumpers are not desired. Some types of actuators provide cushions as a standard. An example is the rodless air cylinder. This actuator is capable of such high speeds that cushions are included to keep the unit from damaging itself.
- Shock absorbers provide the user with many options for desired motion profiles at end of stroke. While more costly than cushions, they can handle much higher loads and speeds. The downside is that they must be replaced periodically.
- Finally, if you want your pneumatic actuator to follow a specific motion profile over the life of the application with little or no need for adjustment or maintenance after it is programmed, you will opt for proportional control. The upfront expense of this option is often outweighed by the lack of attention required later.
There are choices available that will allow you to achieve good motion control for pneumatic actuators. Please pay attention to the last part of the ideal motion profile and choose the method that best fits your particular application. And if you’re still not sure which method to use, don’t hesitate to contact the Cross motion experts!